360-Degree Gaze Estimation in the Wild Using Multiple Zoom Scales
Super Short Introduction
- Paper Link
- This work of mine solves the problem of estimating gaze of a person in unconstrained environments - variable camera-person distance and full 360^\circ variation in Yaw. Variable camera-person distance is handled via a multi-scale approach where features from multiple scales are aggregated. A full 360^\circ variation in Yaw raises an interesting problem of predicting backward gazes which is improved upon by using a weighted sine-cosine transformation.
An Overview of the Methodology
Definitions:
- Yaw \theta and Pitch \phi angle: In polar co-ordinates a normalized 3D vector can be represented by 2 angles. Gaze vector is therefore represented by \theta (left right orientation) and \phi (top down orientation).
")
Sine-Cosine Transformation
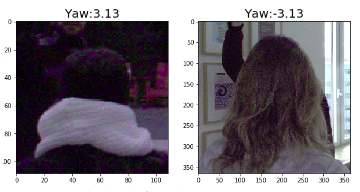
Backward gaze induces discontinuity at \theta=\pm\pi as seen in figure below. Yaw angle is defined with respect to negative z axis. Discontinuity is seen when the projection of gaze vector on XZ plane is very close to positive Z direction. From one side the angle reaches \pi(3.14) and from the other, it reaches -\pi(-3.14).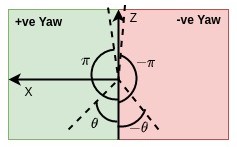
We solve the issue by applying sine-cosine transformation on target - we predict sin(\theta), cos(\theta) and sin(\phi).
It is easy to see that in sine-cosine space, there is no discontinuity at \theta=\pm\pi. We predict \theta from two ways. We estimate Sine-based estimate \theta_S by using predicted sin(\theta) and sign of cos(\theta). We obtain Cosine-based estimate \theta_C by using predicted cos(\theta) and sign of \sin(\theta). Our prediction for yaw is \theta_{SC} = (\theta_S + \theta_C)/2
Weighted Sine-Cosine Transformation
We observe that \theta_C is not able to predict 0^\circ and \theta_S is not able to predict \pm\pi/2 as can be seen in below figure where we look at their distributions.")
We argue that it is due to low derivative of tanh around \pm1 and high derivative of sin^{-1} and cos{-1} around \pm\pi/2 and 0^\circ respectively. We fix this by using a weighted average scheme. Our final prediction for yaw,
\theta_{WSC} = w*sin(\theta) + (1-w)*cos(\theta)
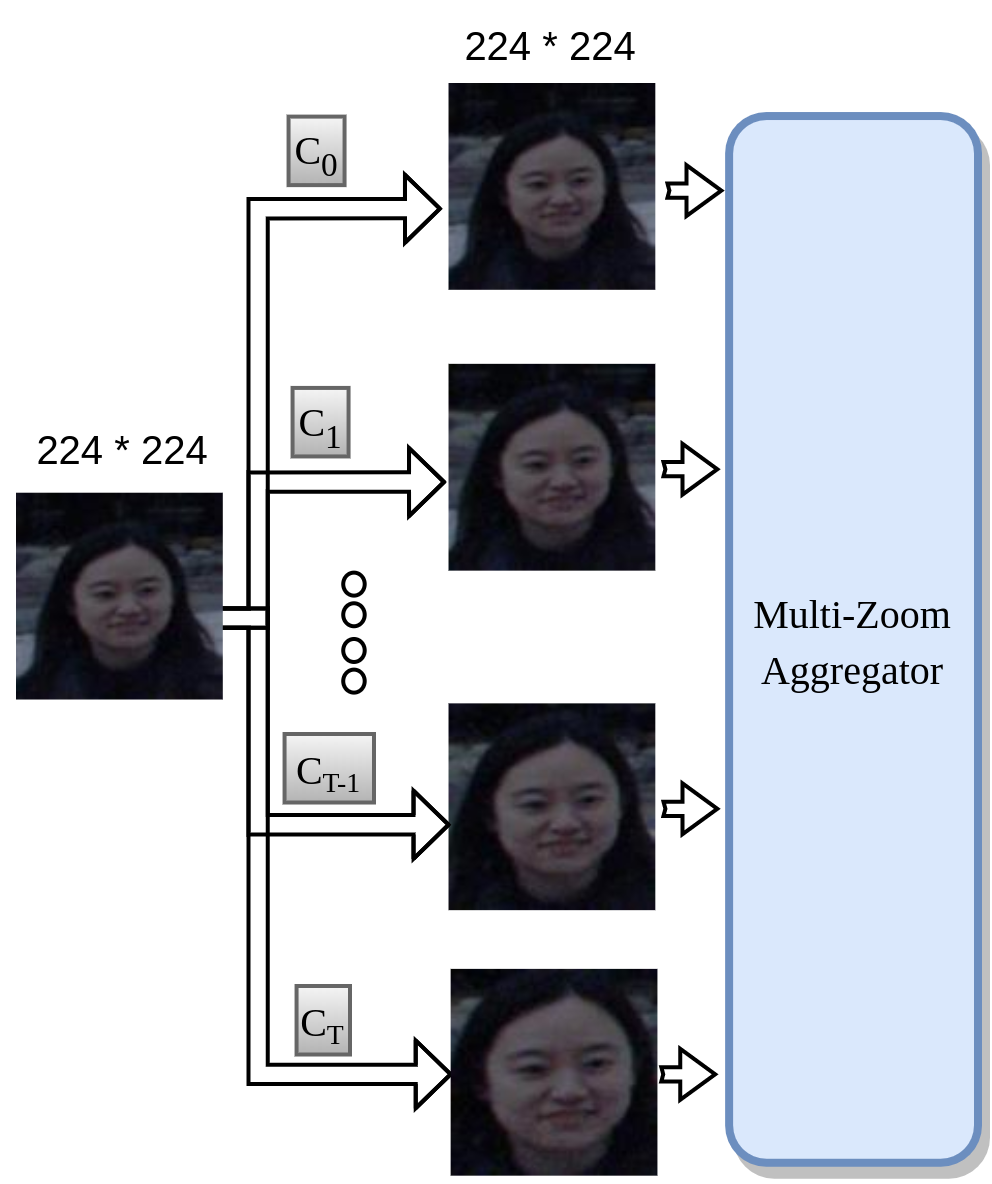
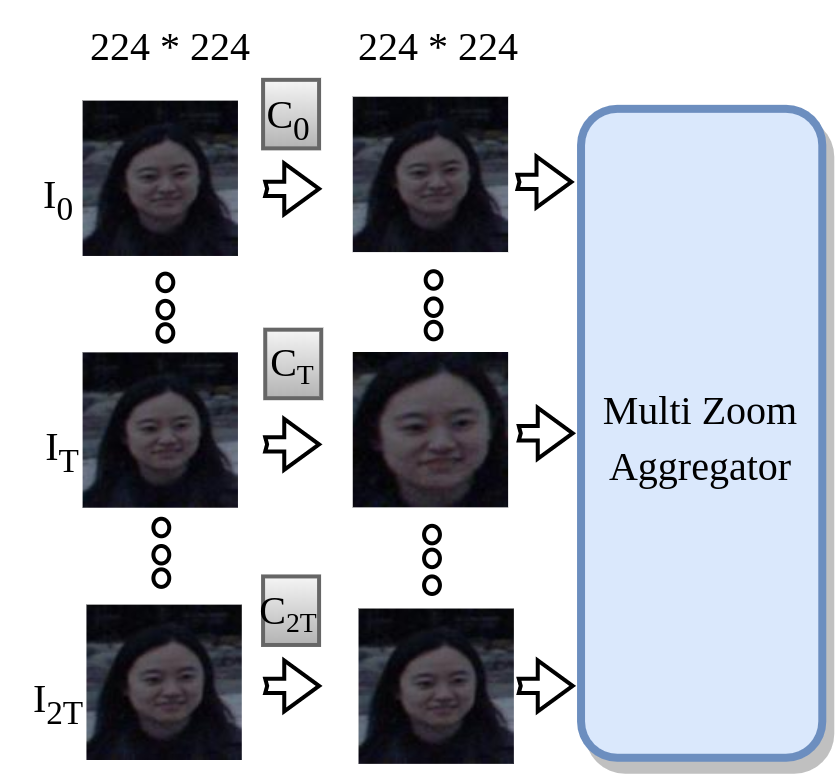
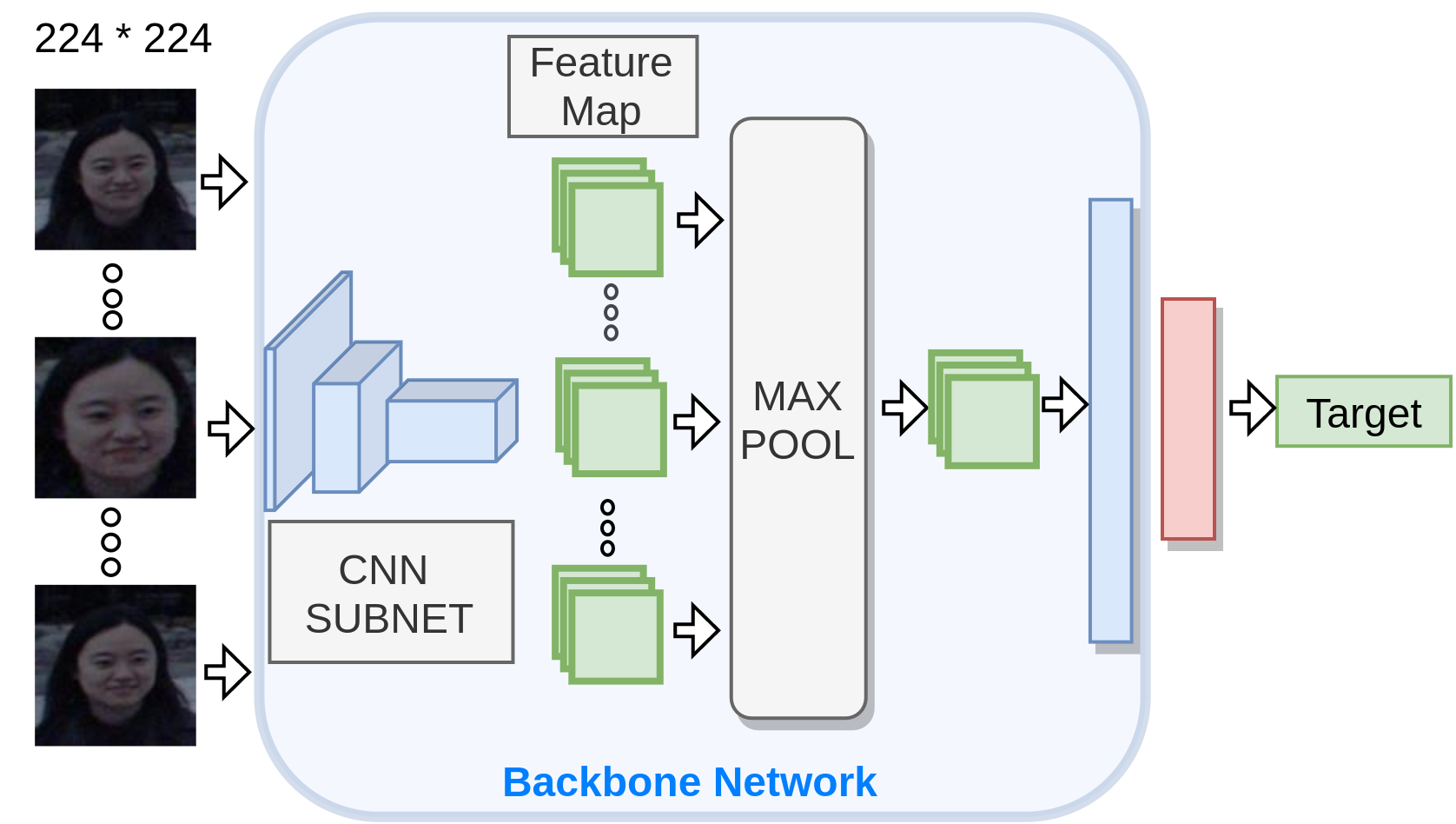
Finally, we note that there is no ambiguity in estimating \phi from sin(\phi) since \phi \in [-\pi/2,\pi/2] ### Multi-Crop Approach We take this approach to do efficient feature extraction over varying head sizes appearing in the dataset as shown below.